My Group's Robot
This is my group's robot:
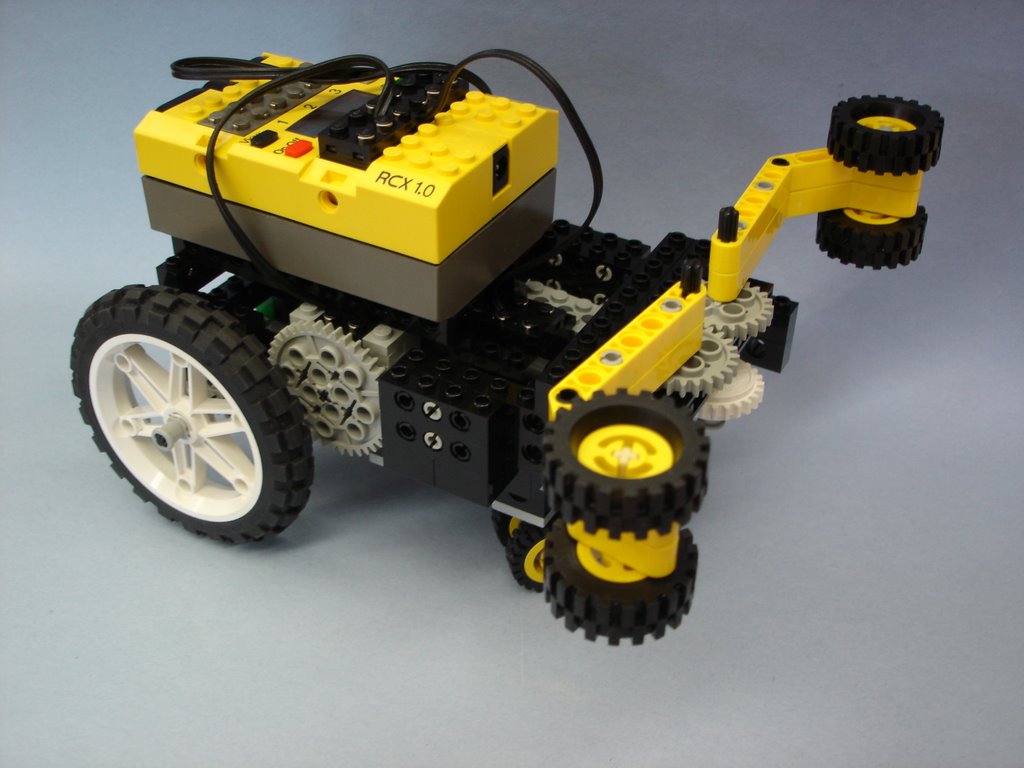
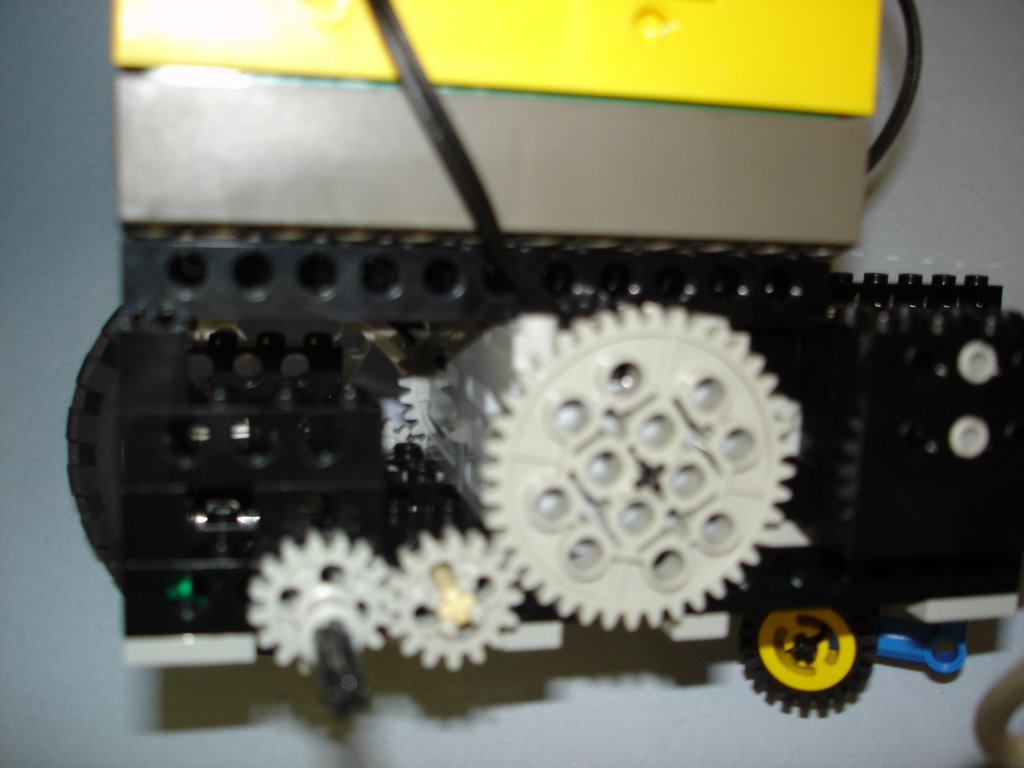
As you can see we have a 2:5 gear ratio which means that for every time the 50-tooth gear spins twice the 16-tooth gear will spin 5 times.
posted by Robert @ 5:11 PM
0 comments
![]()
|
|
My Group's Robot
posted by Robert @ 5:11 PM
0 comments
![]()
Problems With the Claw
Even though we solved the problem of our claw crushing itself the clutch gear kept coming off of the axel so we put a full bushing under it so it wouldn't slide off.
posted by Robert @ 3:36 PM
0 comments
![]()
The Claw is On
posted by Robert @ 2:39 PM
1 comments
![]()
Today During Lego Robotics Talent Class
posted by Robert @ 3:38 PM
1 comments
![]()
